



Управление шаговым мотором. Силовая часть.
Дата: 22 Марта 2014. Автор: Алексей
Всем привет! Наконец-то пришла весна, потеплело и солнышко стало прогревать. Птички запели )) Ну ладно, хватит лирики. Продолжаю писать про шаговые двигатели. А точнее не про них, а как я с ними работаю. Может кому-то будет полезно, а кому нет, решать вам. Поехали. В прошлой статье я писал как подключить ШД к силовому драйверу на базе микросхемы L298N. Получил я тут на днях посылочку вот с такими моторами.
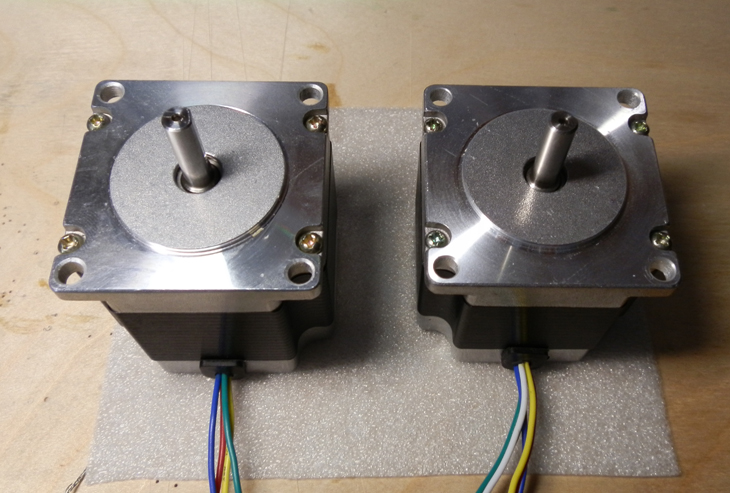
А на моторах написано: "1.8° 2.5А". Вот эти 2.5А меня озадачили, ток как при подключении к выше описанным драйверам, микросхемам поплохело через минуту. Ну думал, думал и нашел в своих запасах MOSFEты. Я ими в свою очередь пытался управлять мотором на фрезерном станке, но так все и заглохло. С передачей 1:2 обороты регулировать просто не понадобилось. Вот я и подумал, а не собрать ли свой силовой драйвер для шаговиков на этих транзисторах. Смотрим на картинку ниже.
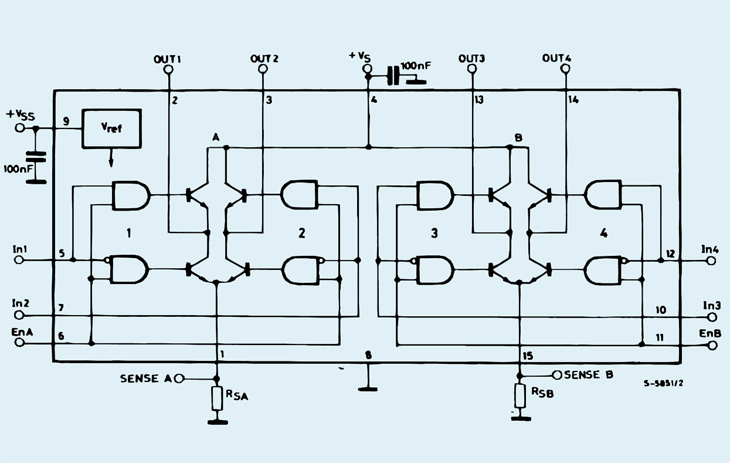
Давайте разберемся по подробнее. Ножка +Vs получает напряжения для мотора. +Vss питание схемы. In1...In4 задают управляющие сигналы. EnA, EnB задают ШИМ. SENSE A, SENSE B нужны для определения протекающего тока. Для этих целей стоят два резистора Rsa и Rsb. OUT1...OUT4 соответственно идут к выводам мотора. Посмотрев на схему я решил сделать такую же но на рассыпухе. Биполярные транзисторы заменил на MOSFET IRFZ44, они самые распространенные. Логику для управления сначала хотел сделать на биполярникак, но нашел им замену в виде готового драйвера от той же фирмы IR2104. Драйвер конечно хороший, но... Жутко боится статики. Сжег 7 микросхем. Понял когда уже со злости перепаивал седьмую микросхему, на нервном срыве выключил музыку и при полной тишине касаясь жалом до ножки микросхемы, слышу "чпок". Следующие ноги сделали тоже самое. От сюда вывод, паять только феном. Второй касяк, драйверы боятся быть грязными. Убил уйму времени пока не помыл в УЗ ванне. Если оставить флюс на плате, то осцил такое выдает )) В связи с копированием данной схемы, решил логику работы переложить на специализированную микросхему L297. Они в принципе созданы друг для друга. Смотрим схему.
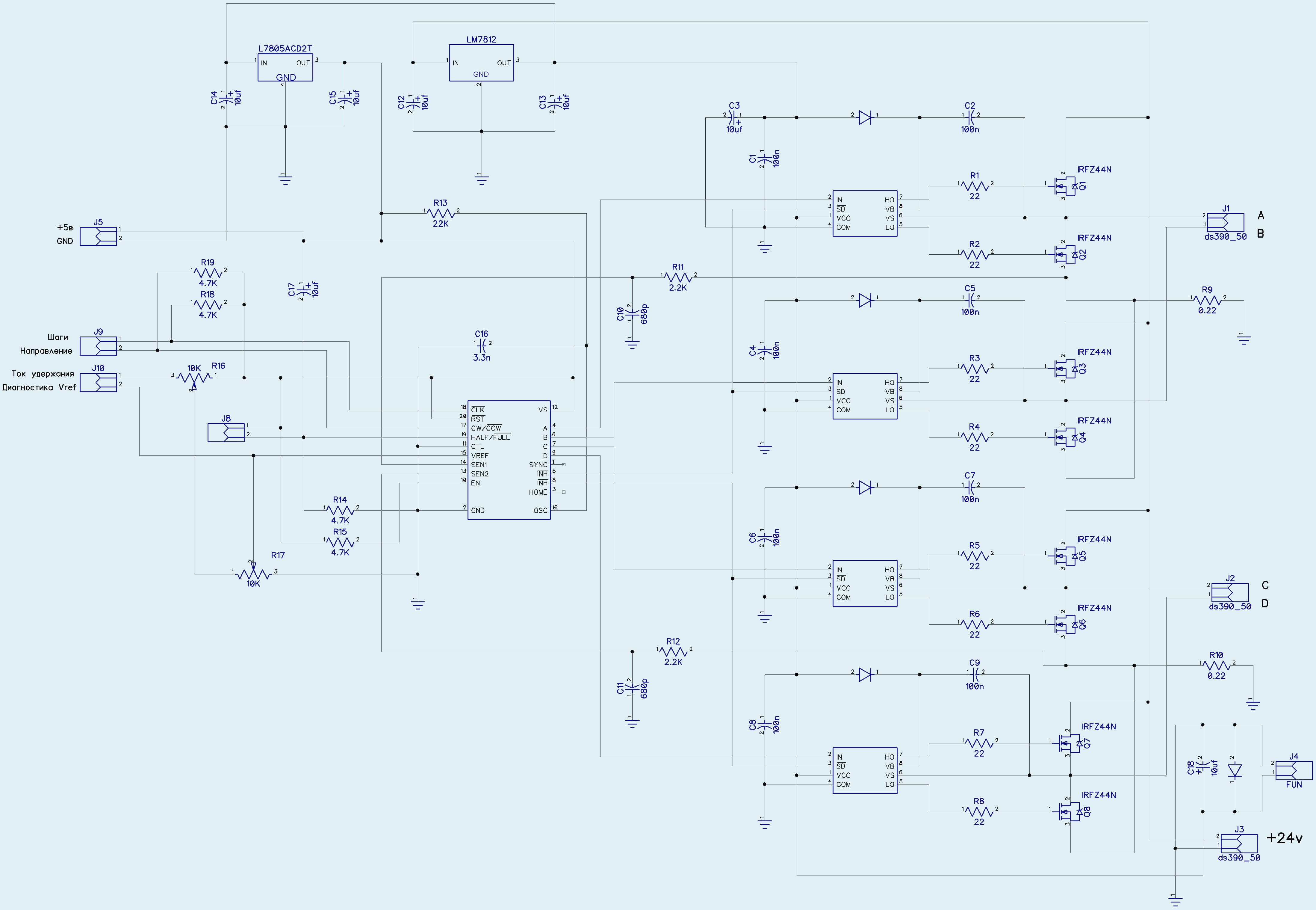
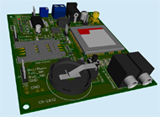
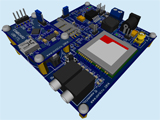
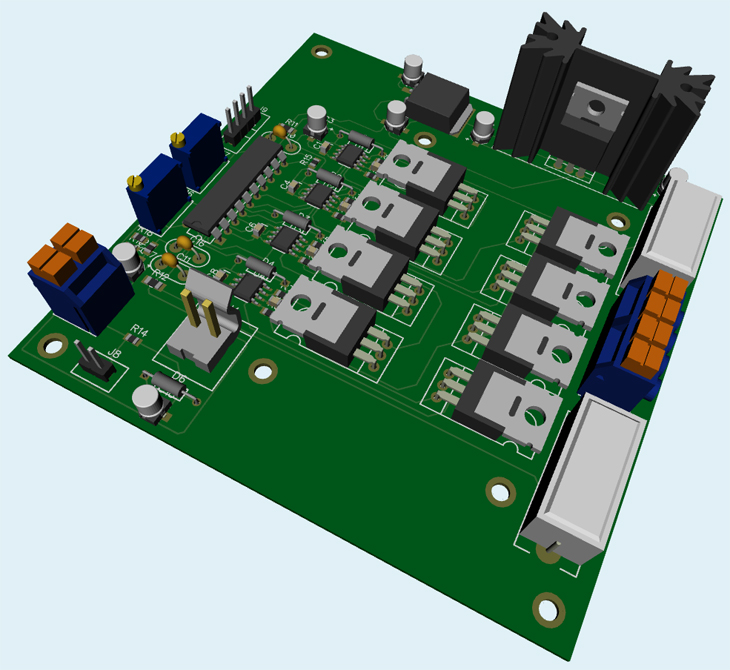
На схеме справа внизу видно разъем для подключения вентилятора охлаждения, но при испытани я заметил что транзисторы не греются вообще, а стабилизатор на 12в греется. Также добавил режим тока удержания. Это нужно для того чтобы в момент простоя мотора ток был минимален. Мотор не греется, экономия электроэнергии )) Если требуется держать вал мотора намертво, можно резистор R16 выкинуть из схемы, а выводы замкнуть между собой. После сборки регулировка не требуется. Точнее требуется. Если стоят два резистора то регулировать нужно так: Сначала нужно вычислить опорное напряжение. Для этого нужно по закону Ома умножить сопротивление резистора R9, это тот 5-ти ваттный, на требуемый ток. Например мне нужно 2,5А. 0.22Ом * 2,5А = 0,55В. То есть требуется подать на ногу 15 Vref микросхемы L297 0.55В. Чтобы это сделать нужно на разъеме J10 на вывод "Ток удержания" подать 5В, а на вывод "Диагностика Vref" повесить тестер. Вращая регулировочный винт резистора R17 добиться 0.55В. Далее не отключая тестер, снять 5В и прижать к земле. Напряжение должно упасть. Далее вычислить ток удержания. Я решил дать 0,75А. Вал сам не провернется но и если что, то рукой можно провернуть. Для моих целей то что надо. 0,22Ом * 0,75А = 0,165В. Значит вращаем резистор R16 до получения требуемого напряжения. Потом снова подаем 5В и корректируем до 0,55В. Подать 0В и проверить ток удержания, если убежал, подправить. Ну короче переключать и регулировать пока требуемые напряжения не установятся. Подаем 5В на вывод "Ток удержания", получаем 0,55В. Подаем 0В, получаем 0,165В. Есть одно но... После остановки мотора, ток удержания сразу уменьшать не надо. Мотор остановили, подождали пол секунды, а потом смело уменьшаем. Да, вот еще один плюс к уменьшению тока, мотор при удержании вала с рабочим током сильно пищит. Если ток уменьшить писк пропадает. Внизу будет видео работы всего этого безобразия и там это хорошо слышно. Резюме: Для того чтобы мотор сделал шаг, нужно на вывод "Ток удержания" подать 1. На вывод "Направление" подать 1 или 0, в зависимости от направления и подать импульс на вывод "Шаги". Один импульс, один шаг. Затем подождать пол секунды и подать 0 на вывод "Ток удержания". Вот весь алгоритм для управления мотором. Ой, чуть не забыл! Разъём J8 нужен для выбора режима Шаг/Полушаг. Если джампера нет, то полношаговый режим, если установлен то полушаговый. Также можно управлять режимом с МК. Если подать 0 на вывод №2 будет шаг, если 1 то полушаг. Страссированную плату не дам. Я не жадный, я просто ее делал для тестов и отработки схемы. В ней много чего есть, что не нужно для работы мотора. Что-то вроде тестовых подсхем )) Не, поделюсь )) Я выкинул из нее все лишние и перетрассировал. Как она будет выглядеть можно посмотреть на 3D модель ниже.
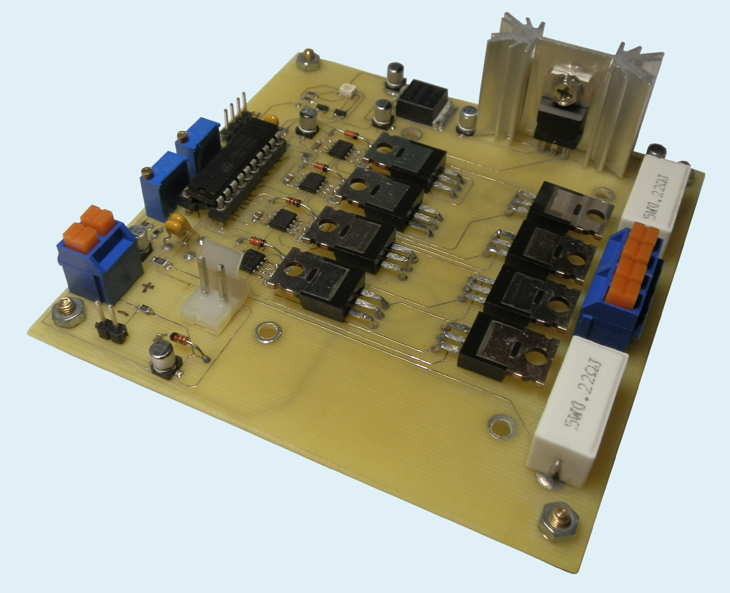
Это реальная плата, но с добавками.
Вот архив с проектом в DipTrace. Да, я предал P-CAD. Меня купили за 3D-модели )) Архив с проектом.
На плате нет ни одной перемычки. Все детали у которых можно подлезть с паяльником к ножке, обязательно пропаять. Разъёмы J5, J8, J9, J10 паять таким образом: Поднять корпус по выводам до самого верха, затем вставить в отверстия таким образом чтобы выводы с другой стороны вылезли на 1 мм и пропаять их. Затем перевернуть плату и пропаять сверху. Затем опустить корпус вниз. Корпус сядет прямо на плату. Это из-за того что в корпусе снизу есть канавка, припой не помешает. Ну вроде все. Будут вопросы, пишите.
Архив с новым проектом.
JW Player goes here